Reaching and Grasping
"... it is the accuracy of a movement that makes it careful and purposive. While some few movements require only brute force of a comparatively ungoverned sort, in most cases there must be a considerable degreee of control and adaptation to a particular end."
R.S. Woodworth (1899) Psychological Review
1. Reaching
a. Action of up to 10 muscles changing angles around the shoulder and elbow. Involving wrist joint and fingers for grasping
b. Has to take into account not only the desired goal and path but also other forces acting on the arm such as gravitation
c. Accurately moving the arm to specific locations is computationally very difficult but certain constraints seem designed to improve performance
d. Movement production: Paths & trajectory
i. path - sequence of positions hand follows in space
(1) paths only slightly curved, same appearance for different speeds and loads
ii. trajectory - time sequence of successive positions
(1) velocity is bell-shaped curve with common appearance for different speeds, loads, targets and subjects
(2) determinants of velocity profile
(a) reaching to point is accomplished with single movement that covers most of the distance to goal
(b) acceleration constantly changing, i.e., velocity never constant
(c) different strategies result in different profiles
(i) minimize peak acceleration, minimize energy, minimize jerk (derivative of acceleration), preserve constant stiffness, minimize peak velocity
(ii) Natural movements appear to minimize energy and jerk while maintaining constant stiffness
iii. Task related control of trajectories
(1) reaching to point compared to reaching to grasp
(a) Ss reaching to touch with or to grasp different size targets at different distances. movement duration increased with increasing difficulty
(b) velocity profiles for different movements also different. reaching to grasp took longer than reaching to point because of longer time of decceleration
(2) reach-grasp-fit compared to reach-grasp-throw
(a) when disk grasped to fit into container the reaching took longer with longer deceleration phase than when disk grasped to throw in which deceleration phase shorter than acceleration
(3) planning and control of trajectories do not occur through use of general, abstract representation
iv. Multisegment coordination during reaching
(1) Subjects reached and either pronated or supinated hand. Velocity profiles of shoulder and elbow angles are smooth and correlated. Velocity profiles of wrist angle is variable and uncorrelated with shoulder or elbow.
(2) Positioning hand in space with shoulder/elbow does not depend on nor is affected by hand orientation.
e. Kinematics
i. Description of the geometry of the limb with reference to the external world
ii. Locating objects in space
(1) visual retinal coordinates
(2) body centered coordinates
(3) limb coordinates
iii. Describing arm configuration
(1) Elbow
(a) hinge joint
(b) one degree of freedom
(i) joint angle
(2) Shoulder
(a) spherical joint
(b) three degrees of freedom
(i) pitch, roll, yaw
(3) Wrist
(a) spherical joint
(b) three degrees of freedom
(i) pitch, roll, yaw
(4) Arm has 7 (3 + 1 + 3) degrees of freedom
iv. Direct kinematics problem
(1) Given the joint angles, find the hand location
(2) Easy problem with unique solution
(a) Suppose shoulder to elbow distance of l1 and elbow to hand distance of l2 with shoulder angle θ1 and elbow angle θ2, then the endpoint of the hand can be specified in (x,y) as
x = l1 cos (θ1) + l2 cos (θ1 + θ2)
y = l1 sin (θ1) + l2 sin (θ1 + θ2)
v. Inverse kinematics problem
(1) Given the position and orientation of the hand in space, find the joint angles that locate the hand at that position and orientation
(2) Hard problem because not unique solution
θ1 = -(l2 sin (θ2))x + (l1 + l2 cos (θ2))y
-(l2 sin (θ2))y + (l1 + l2 cos (θ2))x
θ2 = cos-1 [x2 + y2 - l12 - l22)/2 l1l2]
(3) Computationally efficient if mechanical linkage is built only certain ways. One such structure is a spherical joint at the wrist that allows separation of positioning from orienting. Robot manipulators are built this way.
f. Dynamics
i. relation between joint torques and joint position
(1) torque
(a) effectiveness of a force in setting a body into rotation
ii. Direct dynamics
(1) given a sequence of input torques, find the joint motion
(2) Easy problem with unique solution
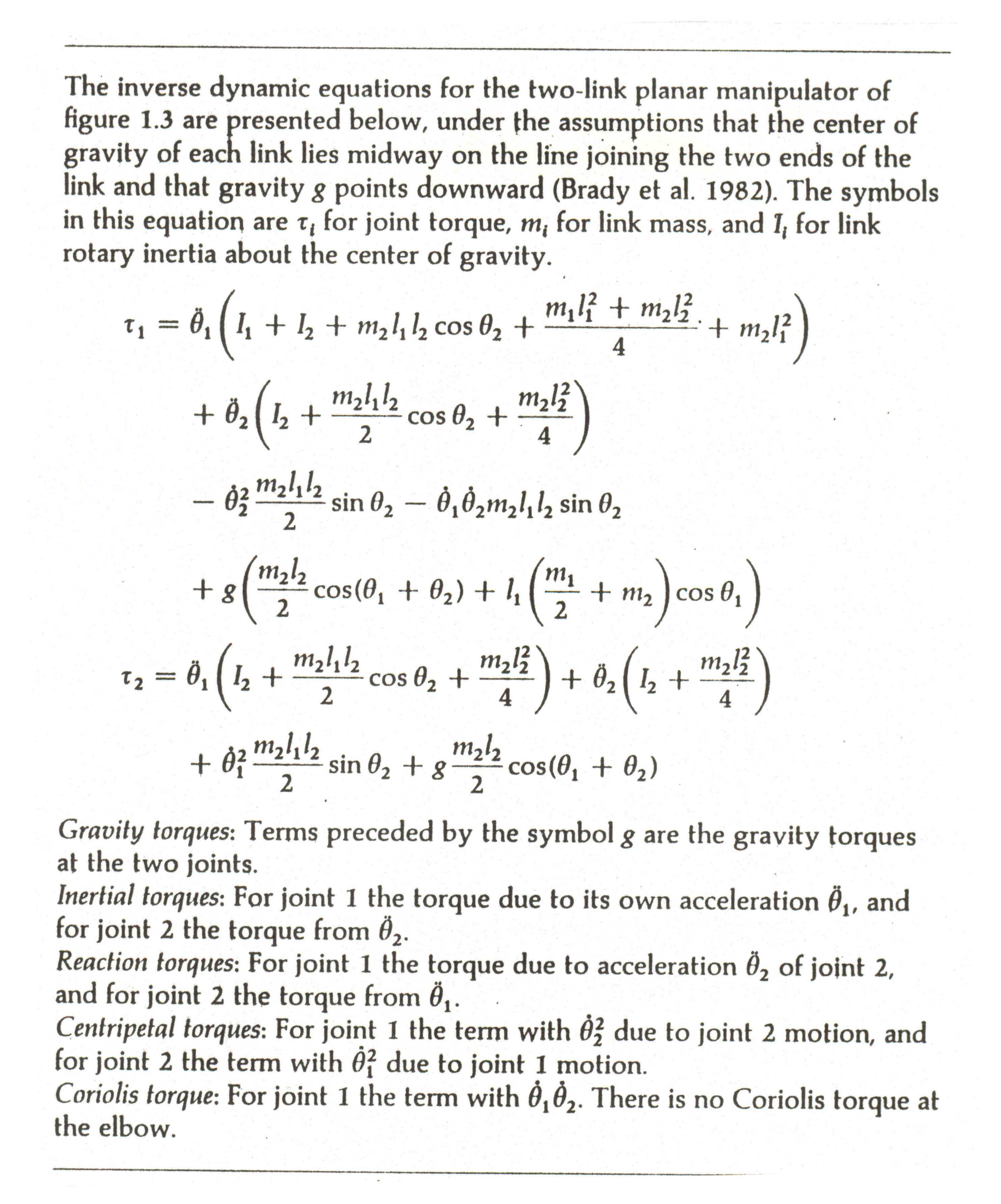
iii. Inverse dynamics
(1) Given desired time sequence of joint angles derived from trajectory planning, find the necessary joint torques
(2) Hard problem because of complex interactions of forces among moving joint segments.
(a) gravity torques
(i) e.g., arm extended in front - gravity torque greatest
(ii) arm extended, bent elbow, then center of gravity moved toward body
(iii) arm extended upward - no net gravity torque
(b) inertial torque
(i) torques due to acceleration of bodies
torque = moment of inertia × angular acceleration
(ii) torque needed for rotation around shoulder depends on elbow angle
(iii) proportional to joint acceleration
(c) reaction torque
(i) acceleration at one joint creates torque at other joints
(ii) e.g., movement at shoulder indirectly causes rotation of forearm at elbow
(d) centripetal acceleration
(i) e.g., rotation around the shoulder causes centripetal acceleration at elbow
(ii) proportional to square of joint velocity
(e) Coriolos torque
(i) due to interaction of rotating coordinate systems
(ii) proportional to product of different joint velocities
(iii) example from weather - rotation of earth causes prevailing westerly winds due to drag on atmosphere. At the same time, there is flow of warm to cold air from equator to the poles. Interaction of these flows creates counterclockwise (in Northern latitudes) vortical forces
(iv) Coriolos torque at the shoulder as result of elbow rotation in certain movements, e.g., vertical.
g. Planning movements
i. the problem is to generate efficient, timely, accurate movements that brings the hand to desired location in space
ii. hand trajectories are usually mostly straight with particular velocity profile. It is not entirely clear why this is so - maybe to minimize time in transit, prevent collisions, also to minimize inertial forces due to jerk
(1) but straight paths of the hand through space often require complicated sequences of joint angles.
iii. the trajectory of the movement represents the brain's solution of the inverse dynamics problem
iv. hierarchical plan
(1) object level planning
(a) desired action, e.g., 'pick up the cup', is converted into a planned trajectory for the hand
(2) joint level planning
(a) trajectory plan is converted to coordinated control of the multiple joints of the arm
(3) actuator level planning
(a) joint movements converted to approporiate muscle activations
v. An unresolved issue is what variables are represented in the brain's computation of trajectory? The initial and final points of the movement are defined behaviorally in endpoint, hand space, but the problem is to understand how the generate the trajectory to get from one endpoint to the other
(1) regularities, invariances in data provide insight into underlying planning
(a) operating assumption that the coordinate space in which the simplest regularities are found indicates the coordinates in which planning takes place. This assumption is motivated by Occam's razor - that given the choice of two explanations, the simpler more parsimonious explanation is preferable. This belief should be open to question. Nature is not necessarily simple - especially when considering a brain that has evolved over hundreds of millions of years.
(2) path and velocity invariance suggest that planning is done in kinematic variables
(a) movements with different loads or in different directions require different kinetic values but yield common regular kinematic values. Therefore, movements are not planned at kinetic level
(b) which kinematic variables - endpoint or joint angle?
(i) planning in endpoint coordinates involves solving inverse kinematics problem to produce desired joint angles
(ii) Planning in joint angle coordinates eliminates inverse kinematics problem
(iii) simple trajectories in one coordinate system correspond to complicated trajectories in another [see handwritten notes for further development]
1) a straight trajectory in joint space usually corresponds to a curved trajectory in hand space
2) a straight trajectory in hand space usually corresponds to curved trajectory in joint space
(3) Path based movement planning
(a) Alternative of planning paths and deriving trajectory dynamics
(b) A controller process learns to produce desired trajectories based on visual feedback of errors on current path
(c) Theoretical mechanism
(i) postulate an array of cells
(ii) the receptive field of each cell represents a point in hand space.
(iii) hand moves along path laid out by activity of successive cells
(iv) paths get more straight as the receptive fields get smaller through learning.
(v) the inverse dynamics problem is solved by muscle properties in this model.
(d) Evidence for path based planning - experiments in which individuals moved a mouse of a computer between two points. The visual image of the mouse trajectory was manipulated so that the visual feedback was altered. If the path was made to appear more curved that it actually was, subjects changed path to compensate.
(i) Evidence from visual psychophysics that perception of straight line motion paths is not correct in all directions. The planes in which straight visual motion is misperceived as being curved correspond to planes of movement in which curved hand reaching trajectories are observed.
h. Accuracy and visual guidance of reaching
i. How are accurate reaching movement produced? To answer this requires measuring how accurate reaches are when made under different conditions. What are the factors that influence reaching accuracy?
(1) Speed-accuracy trade-off
(a) Role of instructions, e.g.,
(i) Minimize time of movement
(ii) Make movements at specified pace
ii. Woodworth, 1899
(1) Record pencil movements on rotating drum
(2) Interval between movements regulated by metronome running at different rates - ranged from 300 to 3000 ms
(3) Applied methods developed by Fechner for sensory psychophysics, e.g., method of average error
(4) The shorter the interval between movements, the greater the error
(5) Error correction due to visual feedback because if eyes closed, then error remains high for all movement rates
(6) Interpreted as due to 'initial adjustment' and 'current control'. Some error correction process continuously adjusts ongoing movement to reach its goal.
iii. Craik, 1947
(1) intermittent feedback control theory
(2) when human subjects track a moving target, correction movements are made every 250-500 ms
(3) rather than continuous control, data indicate intermittent control
(4) intermittent control actually advantageous in preventing oscillations around goal
iv. Fitts, 1954
(1) more thorough investigation of functional relation between movement speed and accuracy
(2) 1954 experiment. Ss hit alternately with stylus two targets of variable width at different separations. Emphasize accuracy over speed.
(a) movement duration increased with amplitude (A)
(b) movement duration increased as target size decreased (W)
(c) defined index of difficulty, log2(2A/W)
(d) Fitt's law
(i) Duration = a + b log2(2A/W)
(3) utilized information theory (Shannon) in analysis of movements. The human motor system was supposed to function like a stochastic (random) communication channel through which information was transmitted in the presence of background noise. Notion of the time (developed as well in other parts of psychology) was that human information processing had a limited capacity. The limited capactiy resulted in the logarithmic trade-off relationship.
(a) the information capacity of the motor system was "specified by its ability to produce consistently one class of movement from among several alternative movement classes. The greater the number of alternative classes, the greater is the information capacity of a particular type of response".
(b) Exactly how information-theory applied at a mechanistic level was not clear and prompted search for alternative explanations
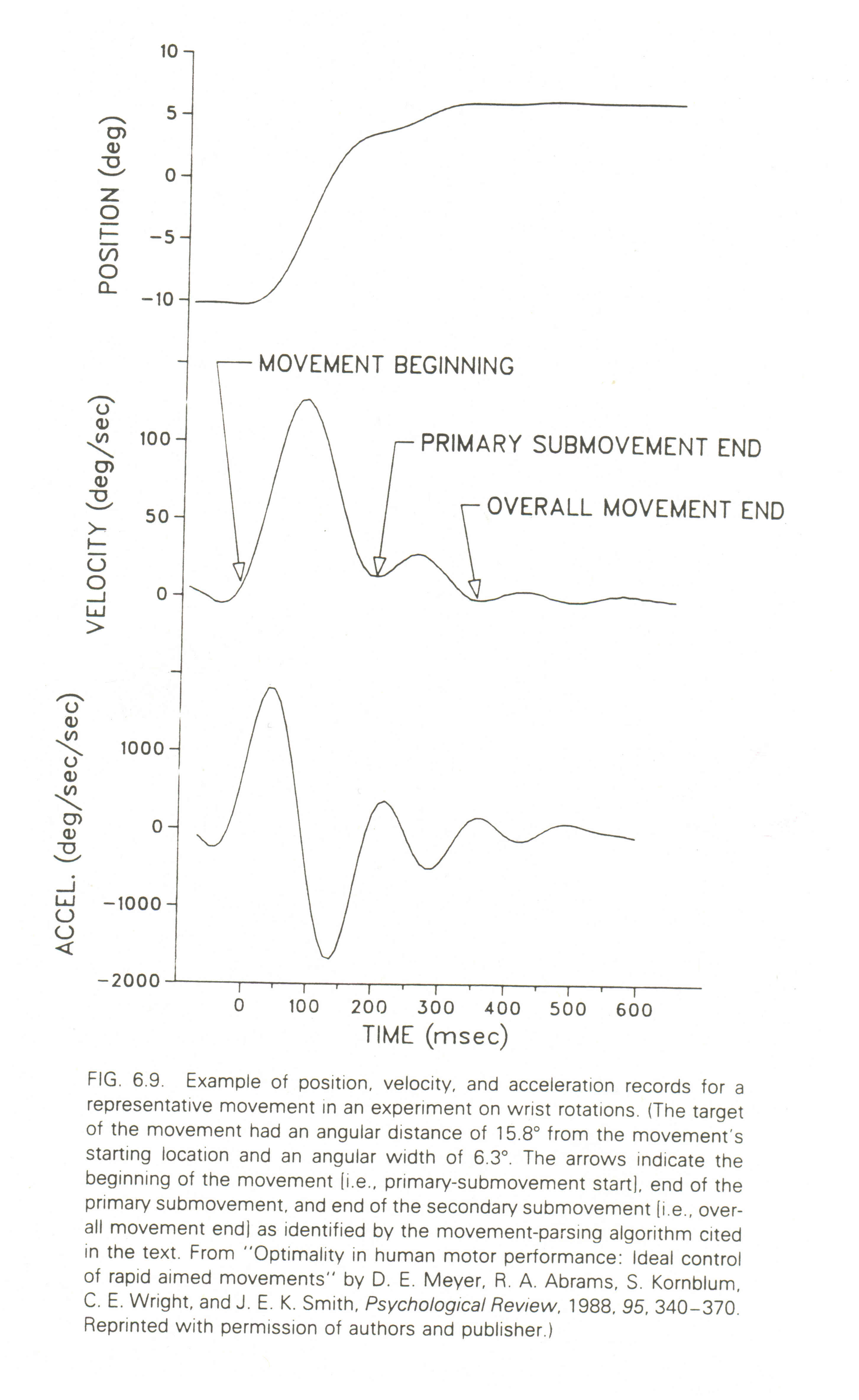
v. Iterative corrections model
(1) Crossman and Goodeve (1963, 1983) - continuous control model
(2) Discrete submovements comprise aimed reaching movements. Each submovement takes the hand a proportion of the distance toward the goal.
(3) As target shrinks or becomes more distant, more submovements needed to reach it. If each submovement takes constant time, then this model predicts Fitt's law.
(4) Evidence for:
(a) Discrete submovements have been observed in movement trajectories
(5) This hypothesis was generally accepted until early 1970s. Evidence against:
(a) Discrete submovements not always observed...
(b) and when they are, they do not occur at fixed intervals or distances
vi. Impulse variability model
(1) Schmidt et al. (1979) - ballistic model
(a) Based on idea that central motor command was an impulse generating force for a certain duration
(b) Force and duration scaled relative to one another to produce movements. Thus, movements of different amplitudes produced by generating more force within same duration
(2) Have subjects make rapid movements minimizing spatial and temporal variability, i.e., make movement toward specific target of specific duration. Movements made within 200 ms. - insufficient time for current control
(3) Observed that standard deviation of endpoints (Se) increased with distance and decreased with duration of movement
Se = k (D/T)
rearranging,
T = k (D / Se)
(4) Proposed that rapid reaches produced by impulse of force driving arm to target
(a) Variability in force production - both amount and duration. The greater the force, the greater the variability. Further assume that amount and duration of force vary independently.
(b) Ss performance finds combination of force and duration that minimize the variation
(5) Problems:
(a) This model is limited to the extent that feedback correction is used in movement production
(b) Force and time may not be independent
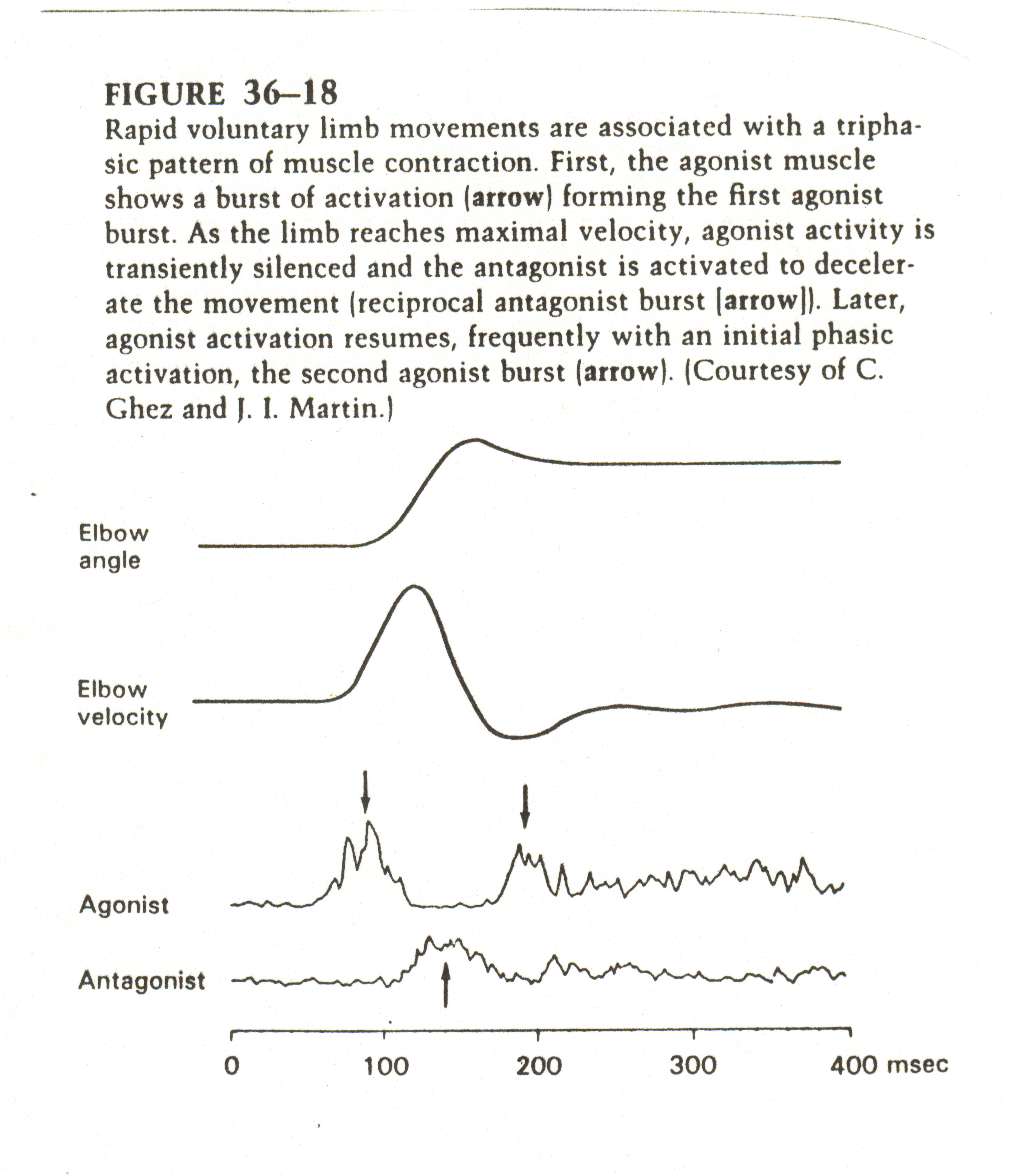
(c) Does not incorporate the antagonist burst, i.e., the precise parameters contolling deceleration
vii. Optimized impulse variability model
(1) Myers et al (1988) - combined elements of ballistic & controlled model to explain results obtained under different conditions
(2) Propose a an initial ballistic large movement to reach target. Successive movements correct errors due to force/time variability. The model incorporates how many submovements are optimal
(3) Derived relation between movement duration, target width and distance and number of corrective movements:
for 2 submovements, an initial and one corrective
T = a + b √(D / W) = a + b (D / W)1/2
for 3 submovements, an initial and two corrective
T =a + b (D / W)1/3
for n submovements, an initial and many corrective
T = a + b * n (D / W)1/n
as n → ∞
T = a + b * ln (D / W)
(4) According to this model, Fitt's law represents optimum balance of movement time and number of submovements
(5) Evidence for:
(a) Total movement duration varies with the number of observed submovements
(b) Number of submovements predicted by total movement time, target distance and target width - usually n=3,4
(c) errors can be predicted
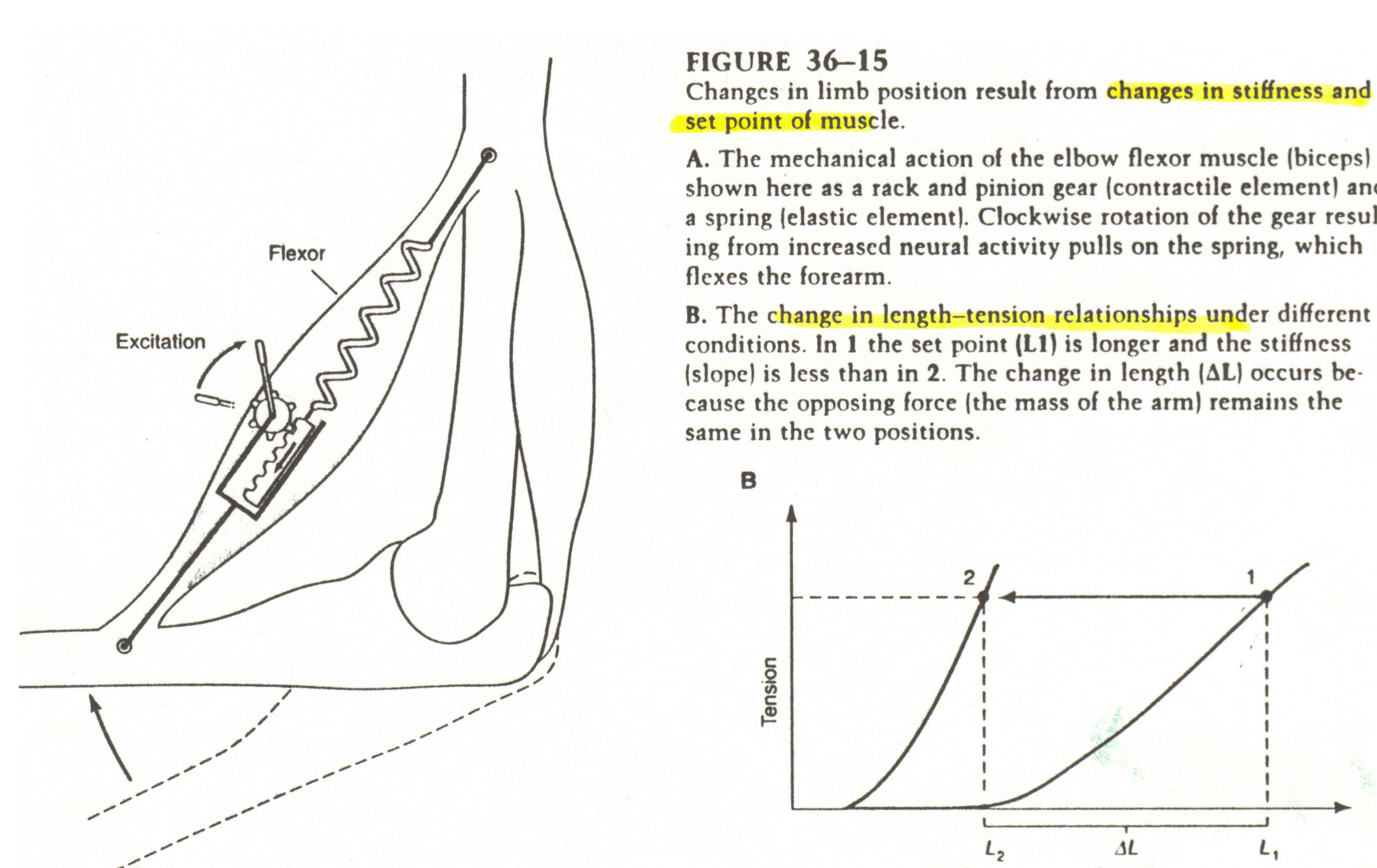
viii. Muscle mass spring model
(a) Joint angle determined by relative tension of opposing muscles
(2) the length-tension curve can shift as muscle stiffness changes and consequently change joint angle
(3) Equilibrium point hypothesis
(a) Movement trajectory in tension x joint angle coordinates
(b) movements produced by shift of equilibrium point
(4) Conceiving of motor program on this level simplifies the problem.
(a) motor programs reduced to simple coding of final limb position
(b) the program: target location in space ⇒ desired hand location ⇒ desired joint angles (inverse kinematics) ⇒ necessary muscle stiffness ⇒ changed joint angle...
(c) Advantages
(i) programming arrest of movement not necessary
(ii) no feedback control necessary
(iii) no need to control movement trajectory
(iv) desired position can be specified without accounting for initial conditions of muscle loads
(d) Evidence for
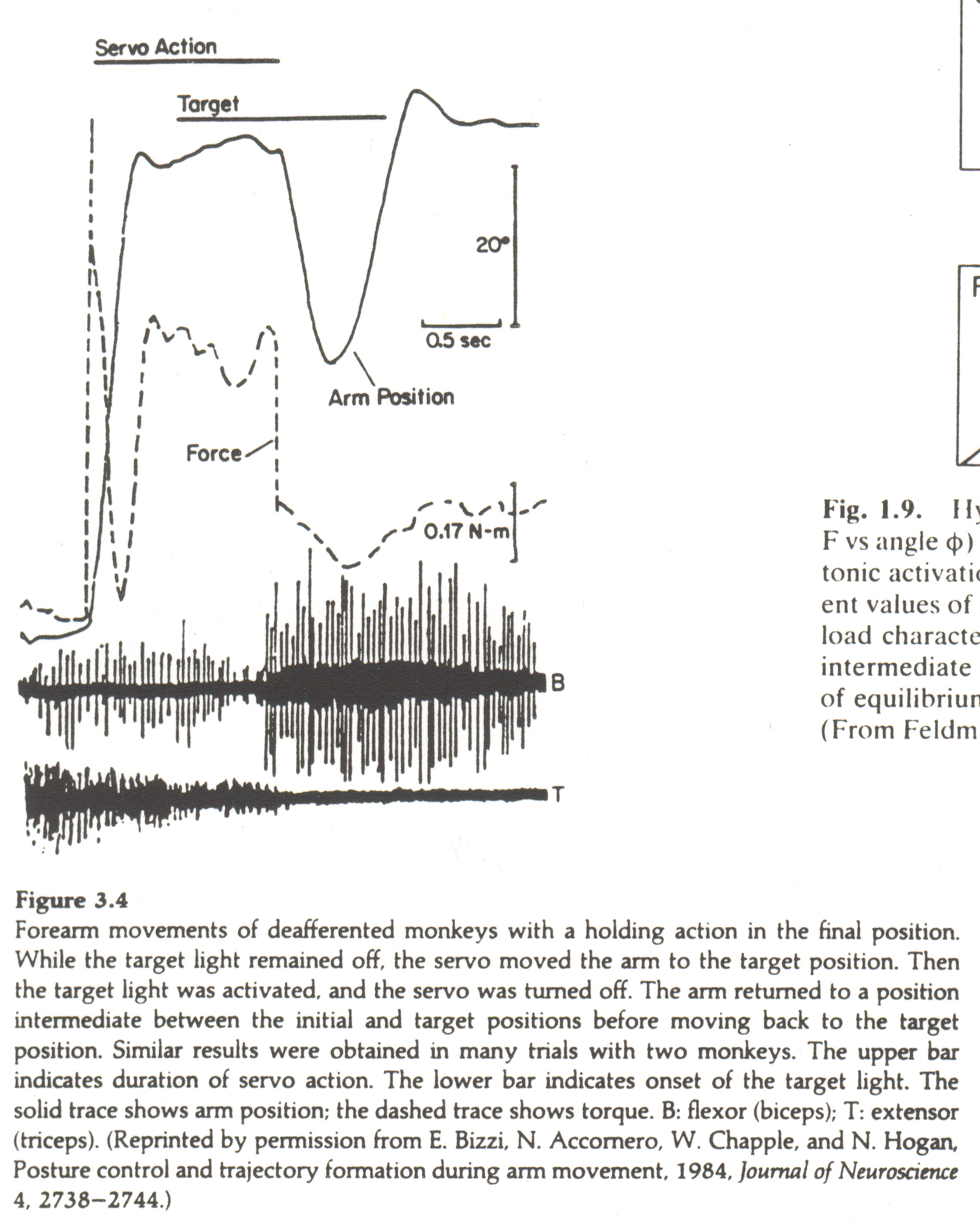
1) monkey moving arm attached to lever-arm. Elbow flexion-extension only. Pointing toward light targets at different angles. A torque motor could manipulate position, trajectory. Monkey could not see arm, so no visual feedback.
2) When arm perturbed before movement initiated, normal monkeys could compensate
3) Then deafferent by cutting dorsal roots at cervical level. Now no visual or proprioceptive feedback.
4) Deafferented monkeys could compensate for perturbation of limb position
5) Deafferented monkey.
a) If arm passively displaced & no target on, then arm returns to original position when torque released.
b) However, if arm displaced to target position then target light presented at that position, then arm released, the arm moves back toward original position before returning to target position. Notice the extension movement occurring while the flexor muscle EMG is active!
(ii) Experiment with humans moving a finger to specific position when perturbed (Kelso & Holt, 1980). Proprioception prevented by inflating cuff - same results as Bizzi et al.
(iii) Normal Ss' reaction to changing loads during movements are predicted by model
(iv) Bell-shaped velocity profile predicted by model
(e) Evidence against:
(i) Day & Marsden (1982) did not replicate Kelso & Holt (1980).
1) alternative interpretation of closed-loop feedback performance
(ii) When muscle spindles activated by vibration producing misperception of displacement, Ss inaccurate in positioning
(iii) Equilibrium point hypothesis works only for movements around single joint. In Bizzi experiment, if arm displaced around shoulder, then there was no compensation.
(iv) Equilibrium point hypothesis does not explain antagonist burst and second agonist burst.
2. Eye-head-hand coordination
a. Eye and head gaze changes
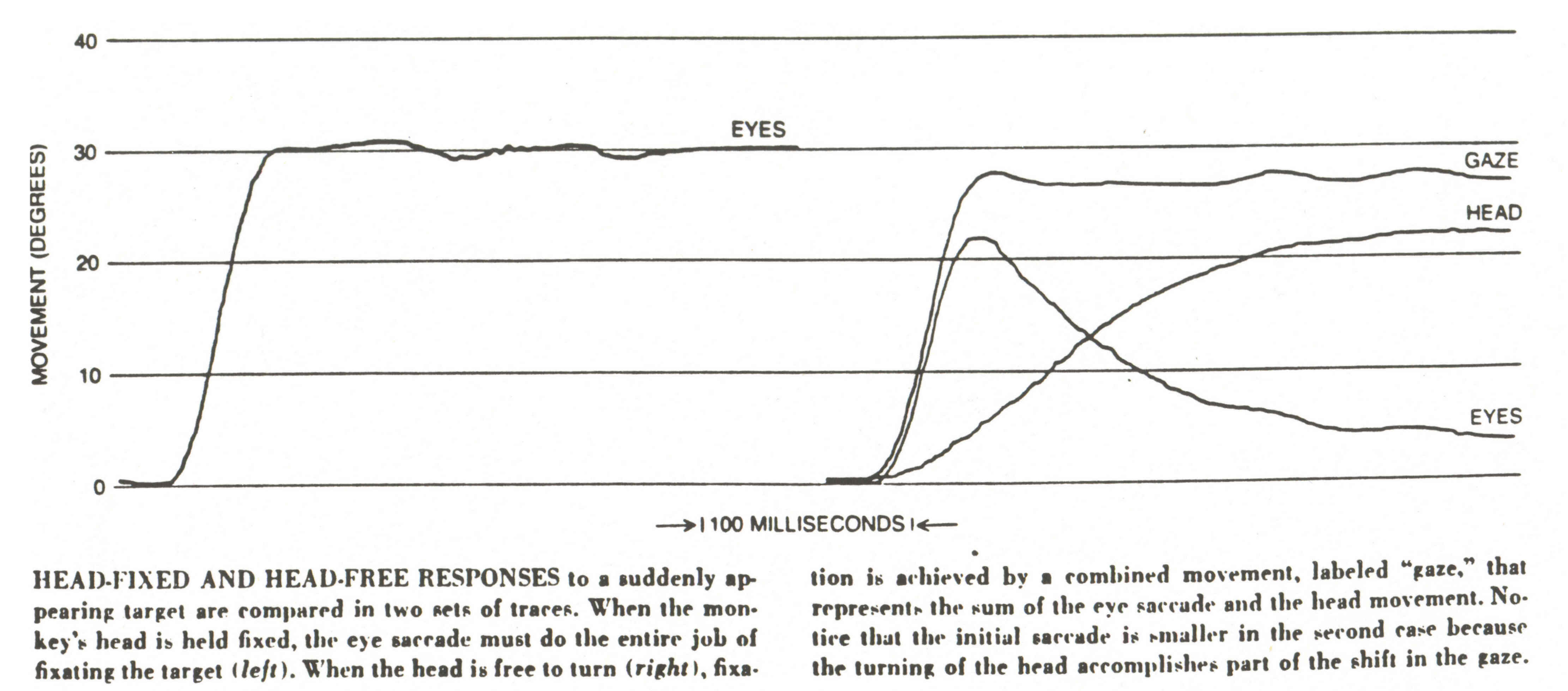
i. Eye + head = gaze
ii. Gaze shift to targets more than 15° eccentric commonly include head rotation
(1) Latency of head rotation longer than saccade
(2) Head rotation undershoots target
(3) Following initial saccade, eyes rotate as head turns due to VOR, keeping gaze on target
iii. Head rotation as well as eye-in-head used for visual localization
(1) Vibration of neck muscles produces illusion of displacement of a visual target toward contralateral space
b. Eye-hand
i. Hand movement follows eye movement by 60-100 ms
c. Eye-head-hand
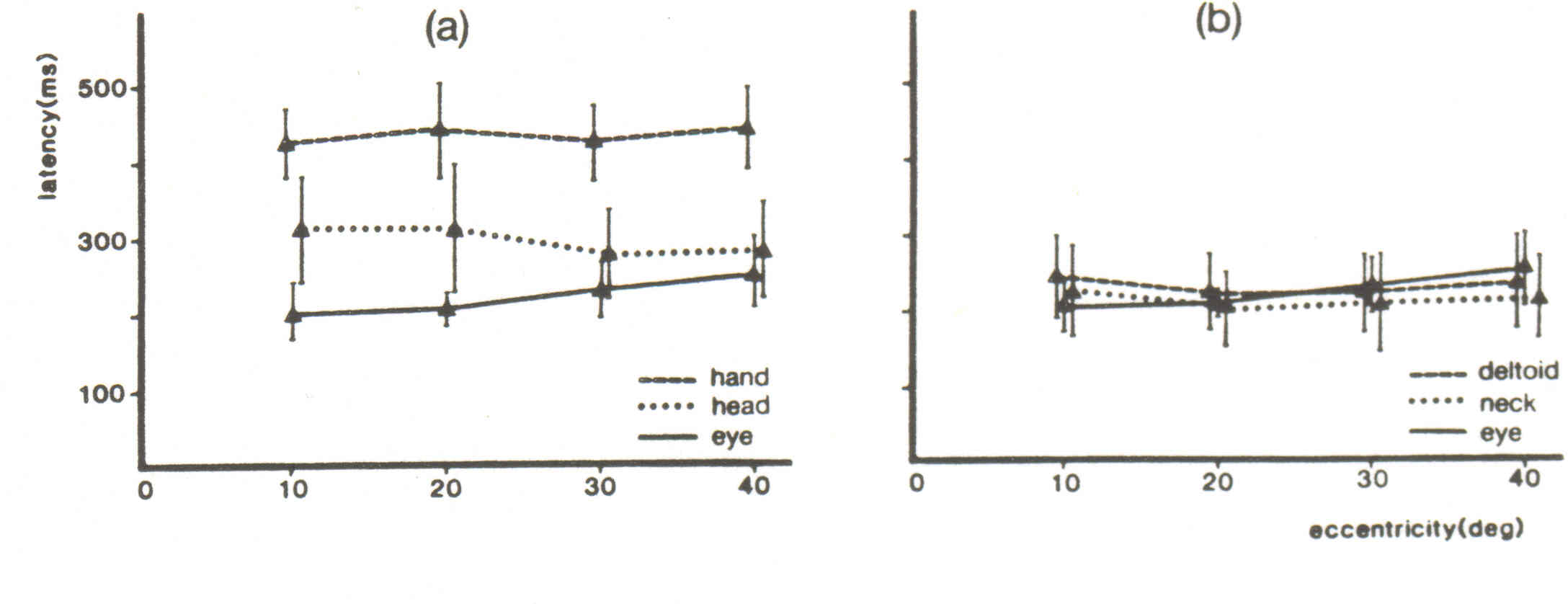
i. Eye movement before head movement before hand movement...
ii. but eye movement = neck EMG = arm EMG
iii. Thus motor command to all three structures issued at the same time, but inertia produces differences in movement latency
iv. Pointing accuracy for eccentric (40°) targets impaired if head rotation prevented
v. Eye foveates target before hand reaches target, so as hand reaches target, it is observed by central vision.
3. Grasping
a. Coordination of proximal and distal segments in prehension. The purpose of reaching is usually grasping
b. Two functional requirements
i. Grip must be adapted to size, shape and use of target object
ii. Timing of finger movements must be coordinated with hand position approaching object
(1) Finger closure that is early or late is ineffective
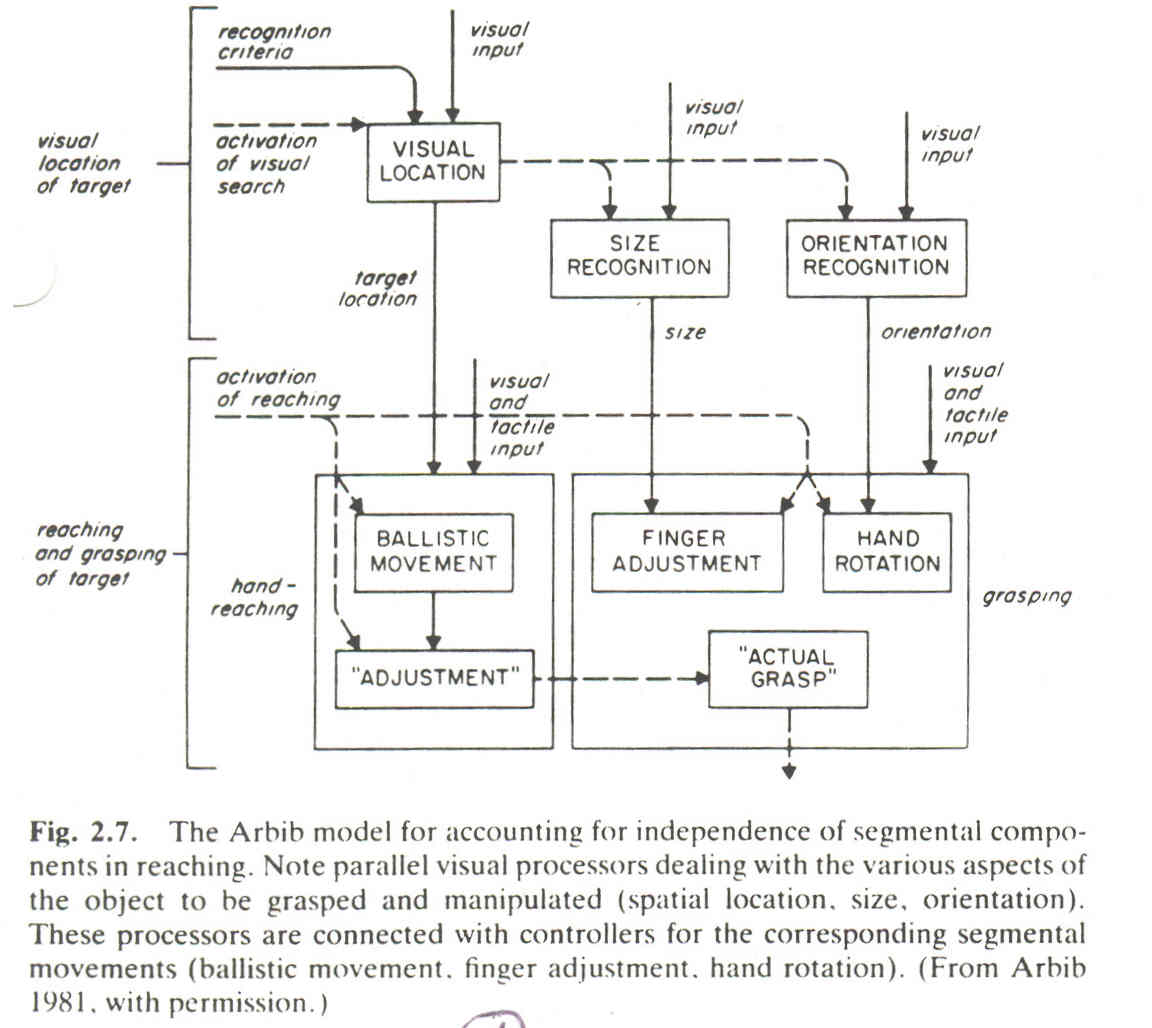
c. Coordination of parallel visuomotor channels
d. Transport and grasp phases of movement
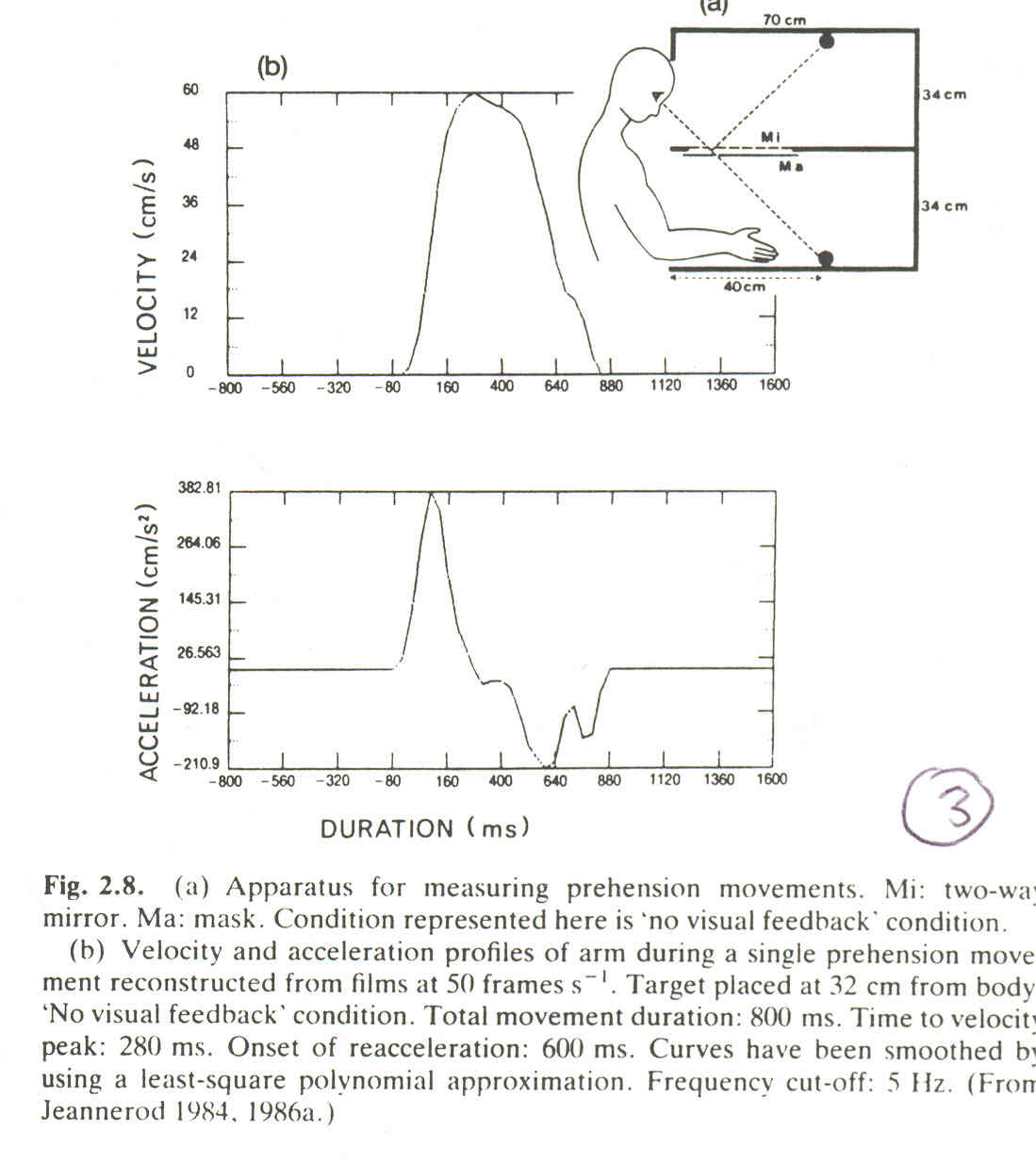
i. Transport phase
(1) Reaching trajectory - initial early acceleration, prolonged deceleration with late re-acceleration
ii. Grasp phase
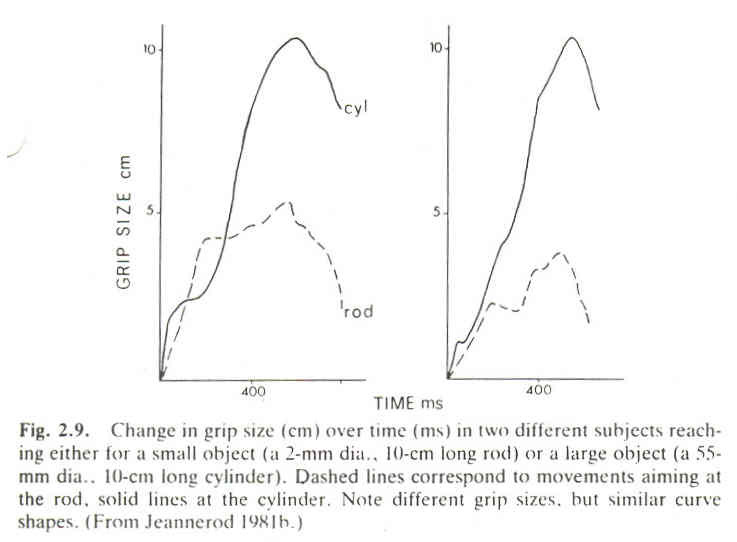
(1) Grip size changes during transport phase
(a) Biphasic increase followed by decrease in grip size during transport
(b) Grip size modified according to size of object to be grasped
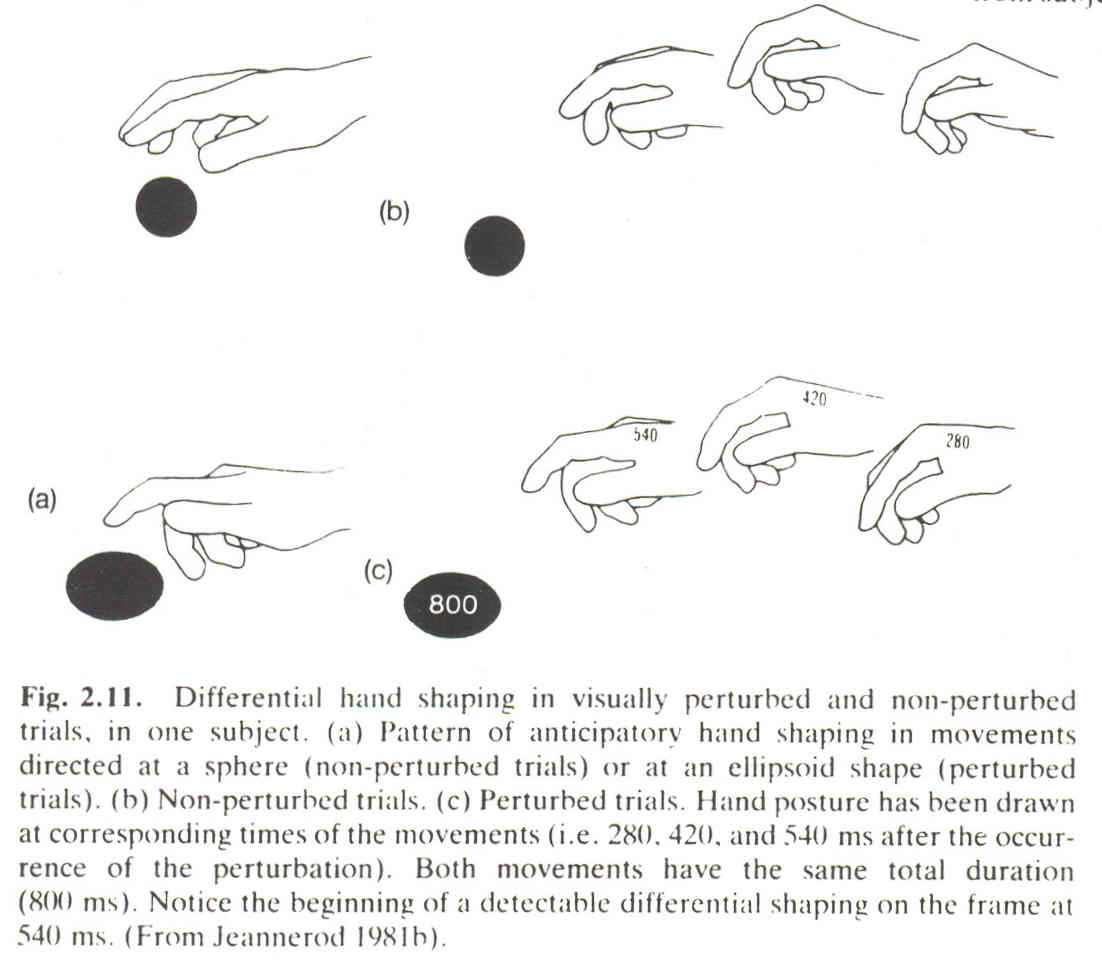
iii. Transport & grasp phase independence
(1) Reaching trajectory not influenced by size of object to be grasped
(a) experiment: during transport phase the size and shape of target object changed unexpectedly
(i) no effect on transport, arm velocity
(ii) pattern of grip adapted to new shape after 500 ms
(2) Controlled by different neural pathways
(a) transport - extrapyramidal & medial spinal cord
(b) grasp - pyramidal tract and lateral spinal cord
(i) fractionation
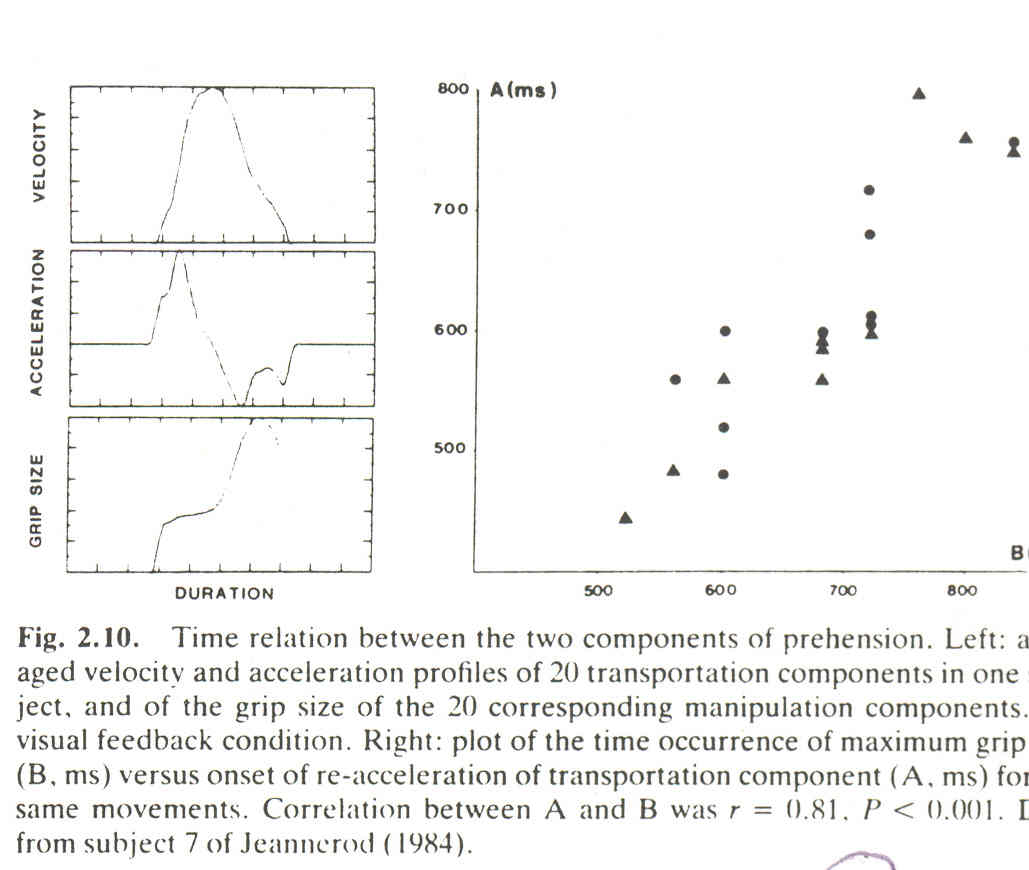
iv. Transport & grasp phase interrelations
(1) Common time course
(a) Grip must close when transport phase completed
(b) Temporal correlation between arm re-acceleration and maximimum grip size
(i) Same relation observed in individuals with artificial limbs in which artificial hand operated by shoulder harness
1) Thus this temporal coordination is not due to biomechanical coupling of arm and finger movements
(ii) Same coordination seen in bird pecking
1) time-course of beak opening and closing related in same way to acceleration profile of head pecking movement
(2) Finger width increases as reach speed increases
(a) increase probability of hitting target
(3) Relation of finger separation to phase of reaching trajectory
(a) widest separation when hand begins slow-apprach phase
e. Choice of grasp
i. How object is grasped depends on orientation, location, whether it has functional asymmetries, e.g., pen, glass, pick up glass that is upside down on table versus glass that is right side up
ii. Rosenbaum study of overhand, underhand grip
(1) minimize times in joint angles far from resting position
f. Problem of controlling contact force and compliance
i. Compliance is pervasive and difficult problem for robot control
ii. Performance lifting different objects
(1) Initial force scaled differently for different objects depending on known weight of object
(2) If
object is unexpectedly dense/heavy, then force scaled over a few lifts
October 26, 2009
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}